Map reading is the process of looking at the map to determine what is depicted and how the cartographer depicted it. This involves identifying the features or phenomena portrayed, the symbols and labels used, and information about the map that may not be displayed on the map. Reading maps accurately and effectively requires at least a basic understanding of how the mapmaker has made important cartographic decisions relating to map scale, map projections, coordinate systems, and cartographic compilation (selection, classification, generalization, and symbolization). Proficient map readers also appreciate artifacts of the cartographic compilation process that improve readability but may also affect map accuracy and uncertainty. Masters of map reading use maps to gain better understanding of their environment, develop better mental maps, and ultimately make better decisions. Through successful map reading, a person’s cartographic and mental maps will merge to tune the reader’s spatial thinking to the reality of the environment.
Author and Citation Info:
Buckley, A. R., and Kimerling, A. J. (2021). Map Reading. The Geographic Information Science & Technology Body of Knowledge (1st Quarter 2021 Edition), John P. Wilson (Ed.). DOI: 10.22224/gistbok/2021.1.8.
This entry was published on January 27, 2021.
This topic is also available in an earlier edition: DiBiase, D., DeMers, M., Johnson, A., Kemp, K., Luck, A. T., Plewe, B., and Wentz, E. (2006). Map reading. The Geographic Information Science & Technology Body of Knowledge. Washington, DC: Association of American Geographers. (2nd Quarter 2016, first digital).
cartographic map: a graphic representation of the environment that can be experienced physically, for example, through sight, sound, or touch
classification: the process of grouping or ordering features into categories (for qualitative data) or classes (for quantitative data)
geographic coordinate system: a positional reference system that uses latitude and longitude to define the locations of points on the surface of a sphere or ellipsoid
grid coordinate system: a coordinate system mathematically placed on a flat map projection surface
image map: a map made by superimposing traditional map symbols on an image base
land partitioning: the division of property into parcels
map marginalia: additional information displayed within the mapped area or outside the main map area that helps explain or support the map
map legend: the key to understanding the mapped features
map projection: a geometric transformation of the Earth’s spherical or ellipsoidal surface onto a flat map surface
map reading: the process of looking at the map to determine what is depicted and how the cartographer depicted it
map scale: the relationship between distances on the map and their corresponding ground distances; also called cartographic scale
mental map: a map of the environment that people hold in their minds; also called a cognitive map
parcel: an area of land that has some implication for landownership or land use
plat: a map drawn to scale to show the parcels within a legal subdivision
qualitative information: information that varies in type but not quantity
quantitative information: numerical data that represent an amount, magnitude, or intensity
positional reference system: a system used to pinpoint the coordinates of features in geographic space
relief: the three-dimensional nature of the terrain surface
remote sensing: the process of collecting images of the Earth and other planetary bodies from a distance
selection: the process of deciding what type of and how much information to portray on a map
symbolization: the process by which features and their attributes are represented by graphically stylized marks or signs, called symbols, and sometimes by labels
terrain surface: a three-dimensional portrayal of data about the elevations of the physical environment
Map reading is the process of looking at the map to determine what is depicted and how the cartographer depicted it (Kimerling, et al., 2016). This involves identifying the features or phenomena depicted, the symbols and labels used, and information about the map that may not be evident on the map. If the symbols on a map and how they came to be there cannot be understood, the features represented on the map cannot be translated into a mental image of the real environment. Therefore, map reading can be framed within a discussion of the tangible cartographic map, which is a graphic representation of the environment that can be experienced physically through sight, sound, or touch, and the mental or cognitive map of the environment that people hold in their minds. Ultimately, it is the map in their heads, not the map in their hands, that people use to make decisions. This encompassing view of maps allows the inclusion of a variety of map forms that are otherwise awkward to categorize, such as mental maps (see Participatory Cartography, forthcoming), web maps (which may exist ephemerally; see Web Mapping), and new cartographic forms developed in the future.
Cartographic maps are valuable aids to help readers gain better understanding of their environment, develop better mental maps, and ultimately make better decisions. The map allows the reader to view the environment as if it were less complicated. There are advantages to such a simplified picture, but there is also the danger of an unrealistic view. Through successful map reading, cartographic and mental maps merge to tune the reader’s spatial thinking to the reality of the environment.
Map reading is a creative and sometimes difficult task because much of what exists in the environment is not shown on the map (see Scale & Generalization), and features on the map may not occur in reality but are instead interpretations of environmental characteristics. Although the mapmaker tries to translate reality into the clearest possible picture of the environment on the map, it is up to the map reader to convert this picture back into a useful mental image of the environment. Accordingly, different users may derive different understandings from the same map (MacEachren, 1995).
To effectively read a map, it is useful to understand what is involved in compiling a map. First, the environment is deconstructed into a selection of constituent features or phenomena that are classified and characterized. Second, meaningful and accurate data are gathered about the features or phenomena and their attributes. Third, the data are processed and manipulated so that the results can be displayed graphically using map symbols in a way that reveals something interesting or useful about the mapped environment (Kimerling, et al., 2016). The resulting graphical display shows the location and characteristics of geographic features and the relationships among geographic features.
Map reading starts with identifying depicted features or phenomena through their map symbols and associated labels. This mental activity is sometimes intuitive, especially if the symbols are familiar (e.g., blue lines for rivers and green polygon fills for vegetated areas (see Design and Aesthetics), features are clearly labeled (e.g., the only green line on the map is clearly labeled “Pacific Rim Trail”), or symbols mimic the feature they portray (e.g., a tent symbol is used to designate a camping area) (MacEachren, 1994). When the symbols cannot be interpreted intuitively, the map legend provides the key to understanding the mapped features (e.g., the topographic map and legend in Figure 1).
Figure 1. The symbols for the features shown on the Crater Lake topographic map by the U.S. Geological Survey (USGS) are identified in the legend. Source: USGS.
The first reading of the map should reveal the geographic area, subject, and form of representation of the features or phenomena shown. Map marginalia are additional graphics and text displayed within the mapped area or outside the main map area that help explain or support the map (Figure 2). The map legend is used to confirm the meaning of familiar symbols and provide the logic that underlies unfamiliar symbols. Alternatively, this information is sometimes in explanatory labels on the map itself or in text blocks (Brewer, 2015).
Figure 2. The map marginalia for the 1:24,000-scale and 1:250,000-scale maps of Crater Lake are primarily at the bottom of the page; for the 1:100,000-scale map they are mostly on the right side of the page. Source: authors.
The following sections present important concepts that impact map reading. Because one of the most fundamental uses of maps is to find the locations of features, map readers must understand how locations on the Earth are transformed to locations on the map. These locations are represented by geographic or grid coordinates, or by using land partitioning systems. Understanding the spatial relationships among features is aided by knowledge of the basics of map projections (see Map Projections) and map scale. To appreciate which features are included and how they are represented on maps, readers benefit from an understanding of how cartographers select, classify, and generalize mapped features (see Scale & GeneralizationandStatistical Mapping). Knowing about symbolization helps readers understand properties or characteristics of the mapped features (see Symbolization & the Visual Variables). Finally, for some maps, reading is aided by knowledge of how the terrain (see Terrain Representation) and remote sensor images (see Remote Sensing Platforms) are used as a base for maps.
Maps show where things are located. Maps that allow for precise determination of the locations of features include a positional reference system. Such a system is based on a geometric model—either a sphere or an oblate ellipsoid—that approximates the true shape and size of the Earth (see Map Projections). Once the dimensions of the sphere or ellipsoid are defined, a graticule of parallels and meridians gives the latitude and longitude coordinates of a feature. The result is a geographic coordinate system—a positional reference system that uses latitude and longitude to define the locations of points on the surface of a sphere or oblate ellipsoid. For example, geographic coordinates in degrees of latitude and longitude are shown at the corner of the Crater Lake map in Figure 3. The locations of elevations measured relative to an average gravity or sea level surface called the geoid are defined by three-dimensional (latitude, longitude, elevation) coordinates.
Figure 3. Latitude and longitude coordinates are shown at the corner of the Crater Lake topographic map. Elevations are defined relative to an average sea level surface called the geoid. Source: USGS.
3.2 Grid Coordinate Systems
The latitude-longitude geographic coordinate system has been used for over 2,000 years as the primary worldwide geographic coordinate system (Slocum et al., 2009). However, geocentric latitude and longitude coordinates on the sphere or geodetic latitudes and longitudes on the oblate ellipsoid, still key to modern position finding, are not as well-suited for making measurements of length, direction, and area on the map. Thus, grid coordinate systems often are used for measurement instead of geographic coordinates.
A grid coordinate system is a Cartesian (x,y) coordinate system placed on a flat map projection surface. This positional reference system designates locations on a map using horizontal and vertical lines spaced at regular intervals so that coordinates can be read from the square grid of intersecting straight lines (Kimerling, et al., 2016). A commonly used grid coordinate system for the world is the Universal Transverse Mercator (UTM) system. UTM coordinates in meters are indicated in the margins of the Crater Lake map in Figure 3, and State Plane coordinates (SPC), also commonly used in the United States, are shown in feet. Map readers should therefore become familiar with the appearance and properties of these and other grid coordinate systems placed on maps to support positioning and measuring features on maps (see Plane Coordinate Systems, forthcoming).
3.3 Land Partitioning Systems
Land partitioning is the division of property into parcels, which are areas of land that have some implication for landownership or land use (Kimerling, et al., 2016). One of the first steps in the management of an area of land is to divide it into parcels that are then recorded on plats—maps drawn to scale to show the parcels within a legal subdivision. People interested in understanding details about landownership, zoning, taxation, and resource management often encounter plat maps and thus need to read them properly to understand their measurements and descriptions.
Land partitioning systems include both irregular (unsystematic) and regular (systematic) systems (Dent et al., 2008). Geometrically irregular schemes used in the United States include the metes-and-bounds system, French long lots, Spanish and Mexican land grants, and donation land claims. Regular systems, common in many parts of the world, include the U.S. Public Land Survey System (PLSS) and Canada's Dominion Land Survey, both of which are based on an array of townships and ranges. The PLSS is portrayed on the Crater Lake map in Figure 3 with red section and township lines and red township and range labels along the margins.
3.4 Map Scale
Maps always are smaller in size than the environment they represent. The amount of size reduction is known as the map or cartographic scale, which is the relationship between distances on the map and their corresponding ground distances (see Scale & Generalization). To use maps effectively, an understanding of important concepts relating to map scale is required, including how map scale is indicated on maps (verbal statements, representative fractions, and scale bars, as shown in Figure 4), how to covert between these indicators, and how to determine the scale of a map when no scale indicator is shown on the map (Kimerling, et al., 2016). Knowing the map scale is needed for correct map reading and use, especially when making measurements (Tyner, 2010).
Figure 4. The map scale for the Crater Lake maps is expressed as a representative fraction, a verbal scale, and four scale bars. Source: authors.
The features of interest must be displayed at the correct scale for many map use purposes (Robinson et al., 1995). Large-scale maps are used when a small ground area is mapped in detail with little generalization of features (see Scale & Generalization). When accurate distance, direction, and area measurements are required, only large-scale maps suffice. The distortion on a map at a scale of 1:250,000 or larger is relatively negligible, so these large-scale maps can be considered geometrically exact representations of the small section of Earth they cover. The Crater Lake map in Figure 3 has a scale of 1:100,000, supporting reliable reading for purposes such as navigation and wayfinding, geocaching, orienteering, and other activities that require accurate position, distance, and direction finding.
Small-scale maps provide a more generalized presentation of a larger area, such as a state, country, continent, or the entire globe. The scale changes continuously across small-scale maps, so scale indicators on these maps give the scale at a particular point or along a given line or lines but are not accurate for the entire map.
3.5 Map Projections
A map projection is a geometric transformation of the Earth’s spherical or ellipsoidal surface onto a flat map surface (see Map Projections)). Marginalia for the Crater Lake map (Figure 3) indicate that the map projection is the one that is used for UTM zone 10 north, which is a transverse Mercator projection with specific parameters to reduce distortion within the zone (between 126°W and 120°W and between the equator and 84°N). Knowing about commonly used map projections allows map readers to infer information about distance and area distortion even if it is not the projection explicitly stated on the map.
Map projections are considered one of the most bewildering aspects of map reading specifically and cartographic design generally (Kessler & Battersby, 2019). Failure to understand the impact of the projection on the resulting map has unfortunate consequences, as it hinders readers’ ability to understand how geographic features are distributed across the Earth. It also allows cartographers—through lack of understanding or by design—to use map projections in potentially deceptive ways.
All map projections onto a two-dimensional plane distort the three-dimensional Earth in some way. The two-dimensional planes on which maps are projected include cones, cylinders, or planes—these are called the developable surfaces (see Map Projections). Distortion in map projections is not only related to these surfaces, it is also related to the case (either tangent or secant) and aspect (equatorial, polar, transverse, or oblique) of the projection and the location of the standard point or line(s) of tangency on the developable surface (Figure 5). Combinations of these projection properties result in recognizable patterns of the graticule in map projections. Being able to identify projection properties through appearance of the graticule helps map readers better assess the geometric distortion on a map.
Figure 5. Properties of map projections, such as the developable surface, case, and aspect, influence the map projection’s geometric distortion. Only at the point and line or lines of tangency is scale true (scale factor or SF = 1). At all other locations, the SF is either smaller or larger than 1. Source: authors.
Map projections often are organized by the geometric properties that they preserve, such as areas or shapes of geographic regions as well as distances or directions from one point or a between a pair of points (Campbell, 2001). The ellipses of Tissot's Indicatrix can be used to visualize the spatial change in distortion across the map. Figure 6 illustrates, via these ellipses, the geometric properties that are distorted or preserved in a selection of common map projections. For a more complete guide to map projections and their properties, see the USGS Map Projections poster at https://www.usgs.gov/media/files/map-projections-poster.
Figure 6. These map projections are commonly used because of the geometric properties they preserve. Distortion in the principal directions of a Tissot's Indicatrix (shown with an orange ellipse) helps visualize the geometric distortion at locations across the maps. Source: authors.
Maps are abstract representations of the geographic environment and not reality itself. Because maps are scaled down representations of the earth (see Scale & Generalization) that are projected onto a most often flat surface (see Map Projections), cartographers reduce complexity and increase clarity during the cartographic compilation process through selection, generalization, classification, and symbolization of the features on the map (Robinson, 1995).
For a cartographer, the first step in compiling information about the world into something that can be represented on a map is called selection—the process of deciding what type of and how much information to portray on a map. The cartographer’s selection of features is driven by the map’s subject and purpose. Once selected, features then are generalized into a simplified form appropriate for the map scale (see Scale & Generalization)for a range of generalization operators). The selected and generalized data can be further manipulated through classification, the process of grouping or ordering features into categories (for qualitative data) or classes (for quantitative data) (see Statistical Mapping).
The final step in the cartographic compilation process is symbolization, a process by which features and their attributes are represented by graphically stylized marks or signs, called symbols (see Symbolization & the Visual Variables), and sometimes by labels (see Typography). Symbols do not always take on the appearance of the geographic features they represent (see Map Icon Design), potentially requiring a legend, as discussed above.
Proficient map readers understand the consequences of decisions made throughout the cartographic compilation process. Skilled map readers also appreciate artifacts of the compilation process that improve readability but may also affect map accuracy and uncertainty (Tyner, 2015; see Representing Uncertainty).
4.2 Mapping Qualitative versus Quantitative Information
Many maps portray qualitative information—information that varies in type but not quantity (Robinson et al., 1995; Figure 7). Learning the basic principles of qualitative data symbolization help map readers understand how different types of point, line, and area features are symbolized on maps. Map readers should be able to understand the ways that cartographers depict a single feature using point, line, or area symbols, or combine multiple features in more complex reference or thematic maps and charts.
Figure 7. Qualitative visual variables for features represented by point, line, and area symbols on maps. Source: authors.
Similarly, map readers should understand the methods cartographers use to portray quantitative information—numerical data that represent an amount, magnitude, or intensity (see Common Thematic Maps, forthcoming; Robinson et al., 1995; Figure 8). Quantitative information often is shown using classes to simplify the map and associated legend, but at the cost of potentially masking important variations in the data distribution (see Statistical Mapping). Accordingly, the variety of classification methods and their differences must be understood to properly read quantitative information on maps. For more information on mapping qualitative and quantitative information, see Symbolization & the Visual Variables) and Map Icon Design).
Figure 8. Quantitative visual variables for features represented by point, line, and area symbols on maps. Source: authors.
In mapping, a terrain surface is a three-dimensional portrayal of elevation data describing the physical environment (see Terrain Representation). For topographic maps, understanding relief—the three-dimensional nature of the terrain surface— is crucial to establishing position and studying spatial associations of the terrain with other geographic phenomena, such as vegetation and rainfall. Knowing the many ways that relief is portrayed cartographically—such as contours, relief shading, hypsometric tinting, and oblique views, to name only a few (Figure 9)—allows map readers to determine absolute or relative elevation on maps and to identify different terrain features (Slocum, et al., 2009).
Figure 9. The terrain around Crater Lake can be represented by contours, relief shading, hypsometric tinting, and combinations of these. An oblique projection provides a three-dimensional perspective of terrain compared to planimetric maps that portray the landscape from a vantage point directly above the mapped area. Source: authors.
5.2 Example 2: Reading Image Maps
The use of remote sensingin support of cartography has grown enormously over the last century (see Remote Sensing Platforms). Remote sensingisthe process of collecting images of the Earth and other planetary bodies from a distance. These remotely sensed images capture features in the environment using cameras or other electronic imaging instruments (sensors) that are sensitive to the energy emitted or reflected from objects (Robinson et al., 1995; Campbell, 2001).
Although remotely sensed images are excellent for showing many features in the environment, they may fail to depict others, for example, political boundaries. Many useful map elements, such as symbolized features, labels, and reference grids, are absent on images. Features on images typically are not classified and identified in a legend. For these reasons, remotely sensed images often are made more interpretable and useful by cartographic enhancement, with overlaid symbols for point, line, and area features, as well as text for labels. A map made by superimposing traditional map symbols on an image base is called an image map (Kimerling, et al., 2016), which is a common option for web maps today (Figure 10).
Figure 10. This online image map of Crater Lake is annotated to show the roads and creeks near the southwestern rim of the crater. Note the distortion in the appearance of the trees near the lake which appear to be leaning toward the water. Source: authors.
Properly reading image maps is aided by an understanding of the many factors that can influence the appearance of the remotely sensed images, including the sensor’s vantage point, spectral sensitivity, technical quality, spatial resolution, and atmospheric conditions. Additionally, map readers may need to understand how to interpret black-and-white, true-color, and color-infrared imagery or how to identify variations in the appearance of features and patterns in images taken in the visible, near-infrared, thermal-infrared, and microwave (radar) portions of the electromagnetic spectrum.
Familiarity with the cartographic concepts and mapping methods outlined above give map readers an appreciation of the important decisions that are made about what to map and the methods used to show different aspects of the environment on maps. Understanding key concepts related to geographic locations, cartographic compilation, and unique map types help map readers to better understand the large and varied amount of geographic information that can be gathered from reading a map as well as the map’s accuracy or uncertainty. If map readers can merge their mental maps with their reading of cartographic maps, they will be better able to tune their spatial thinking to the reality of the environment. This is the ultimate goal of map reading, because it is the map in their heads, not the map in their hands, that people use to make decisions.
References:
Brewer, C. A. (2015). Designing better maps: A guide for GIS users (2nd ed.) California, USA: Esri Press.
Campbell, J. (2001). Map use & analysis (4th ed.) New York: McGraw-Hill.
Dent, B., Torgusen, J., & Hodler, J. (2008). Thematic map design (6th ed.). New York: WCB/McGraw-Hill.
Kessler, F. C., & Battersby, S. E. (2019). Working with map projections: A guide to their selection. Boca Raton, FL: CRC Press.
Kimerling, A. J., Buckley, A. R., Muehrcke, P. C., & Muehrcke, J. O. (2016). Map use: Reading, analysis, interpretation (8th ed.). California Redlands, CA: Esri Press.
MacEachren, A. M. (1994). Some truth with maps: A primer on symbolization and design. Washington: Association of American Geographers.
MacEachren, A. M. (1995). How maps work: Representation, visualization, and design. New York: Guilford Press.
Robinson, A. H., Morrison, J. L., Muehrcke, P. C., Kimerling, A. J., & Guptill, S. C. (1995). Elements of cartography (6th ed.). New York: Wiley.
Slocum T. A., McMaster, R. B., Kessler, F. C., & Howard, H. H. (2009). Thematic cartography and geographic visualization (3rd ed.). Upper Saddle River, NJ: Pearson/Prentice Hall.
Tyner, J. A. (2010). Principles of map design. New York: McGraw-Hill.
Tyner, J. A. (2015). The world of maps: Map reading and interpretation for the 21st century. New York: Guilford Press.
Learning Objectives:
Explain the relationship between a cartographic map and a mental or cognitive map.
Match the symbols on a map to their corresponding explanations in the legend.
Identify the location of the same feature on different maps that use the geographic coordinate system versus a grid coordinate system.
Illustrate the ways that scale can be indicated on a map and convert from one scale indicator to another.
Compare and contrast the distortions caused by map projections (for example, area, shape, length, and direction.)
Identify through appearance of the graticule the distortion in a map projection.
Explain the steps in the cartographic compilation process and discuss their impact on map reading.
Discuss the primary differences between mapping quantitative and qualitative data.
Find specified features on a topographic map and determine the elevation of these features.
Compare and contrast issues with reading topographic maps, terrain maps, and image maps.
Instructional Assessment Questions:
Give the latitude and longitude of the following places (express each in N–S, E–W notation and in ±90°, ±180° degree notation):
A quarter of the way around the Earth going west from the prime meridian, halfway from the equator to the north pole (45°N, 90°W; 45°, –90°)
Intersection of the equator and prime meridian
A point one-third of the way from the equator to the north pole and one quarter of the way around the Earth, eastward from the prime meridian
A point halfway from the equator to the south pole and one-quarter of the way around the Earth, eastward from the prime meridian
On a map of 1:40,000 scale, the distance measured between points A and B is 7.3 inches. What ground distance in miles and kilometers does this represent?
Determine the representative fraction of a map at 0°, 30°, and 60° latitude, then create a scale bar for the map at each of these three latitudes.
Using a topographic map segment, determine the UTM and SPC coordinates for a designated feature on the map.
Describe the land partitioning systems responsible for the landscapes seen in images of three different areas of the country or world (for example, French long lots, metes and bounds, and PLSS).
Take a 1:24,000 topographic quadrangle of your area into the field and compare the contours you see on the map with terrain features on the ground. Get a feel for the relationship between contours and terrain features. Repeat the process with a 1:100,000-scale topographic map of the same area. Is it easier or harder to relate contours to terrain features on this smaller-scale map?
Using maps from the printed media (newspapers, news magazines), find examples of the different classes of qualitative symbols. Separate your examples into single-theme and multi-theme maps and by how the point, line, or area information is being displayed.
Study quantitative thematic maps in books, atlases, newspapers, weekly news magazines, or from the Internet. For each map, determine what graphic elements were employed to create a magnitude message at the ordinal, interval, or ratio level of measurement. Search until you have found several examples of the techniques mapmakers use to portray data at these three levels of measurement. Sort your maps from the previous exercise into good and poor examples of cartographic design.
Look for different types of remotely sensed images for a region of interest. Find examples of black-and-white, true-color, and color-infrared aerial photos. Also obtain scanner images taken in the visible light, near-infrared, thermal-infrared, and microwave (radar) portions of the spectrum. Select features on one image, and study how their appearance changes in the other types of imagery. Get a feel for the strengths and weaknesses of each type of imagery. What purpose does each serve, and how can the different images be used in combination to learn more than can be determined from any one image?
Look at large-scale topographic maps at different scales and determine how the accuracy of each map is conveyed. Carefully study each map and its legend. Then, for each map, write down what you would have liked to have been told about its accuracy.
Additional Resources:
Bertin, J. (2010). Semiology of graphics: Diagrams, networks, maps. California: Esri Press.
Harley, J. B. (1988). Maps, knowledge, and power. In D. Cosgrove, & S. Daniels, (Eds.), Iconography of landscape: Essays on the symbolic representation, design and use of past environments, (277-311). Massachusetts: Cambridge University Press.
Kraak, M-J. (2014). Mapping time: Illustrated by Minard’s map of Napoleon’s Russian campaign of 1812. Redlands, CA: Esri Press.
Krygier, J., & Wood, D. (2016). Making maps: A visual guide to map design for GIS (2nd ed.). New York: Guilford Press.
Monmonier, M. S. (1996). How to lie with maps (2nd ed.). Illinois: University of Chicago Press.
Wood, D. (1992). The power of maps. New York: Guilford Press.

Map reading is the process of looking at the map to determine what is depicted and how the cartographer depicted it. This involves identifying the features or phenomena portrayed, the symbols and labels used, and information about the map that may not be displayed on the map. Reading maps accurately and effectively requires at least a basic understanding of how the mapmaker has made important cartographic decisions relating to map scale, map projections, coordinate systems, and cartographic compilation (selection, classification, generalization, and symbolization). Proficient map readers also appreciate artifacts of the cartographic compilation process that improve readability but may also affect map accuracy and uncertainty. Masters of map reading use maps to gain better understanding of their environment, develop better mental maps, and ultimately make better decisions. Through successful map reading, a person’s cartographic and mental maps will merge to tune the reader’s spatial thinking to the reality of the environment.
Buckley, A. R., and Kimerling, A. J. (2021). Map Reading. The Geographic Information Science & Technology Body of Knowledge (1st Quarter 2021 Edition), John P. Wilson (Ed.). DOI: 10.22224/gistbok/2021.1.8.
This entry was published on January 27, 2021.
This topic is also available in an earlier edition: DiBiase, D., DeMers, M., Johnson, A., Kemp, K., Luck, A. T., Plewe, B., and Wentz, E. (2006). Map reading. The Geographic Information Science & Technology Body of Knowledge. Washington, DC: Association of American Geographers. (2nd Quarter 2016, first digital).
1. Definitions
cartographic map: a graphic representation of the environment that can be experienced physically, for example, through sight, sound, or touch
classification: the process of grouping or ordering features into categories (for qualitative data) or classes (for quantitative data)
geographic coordinate system: a positional reference system that uses latitude and longitude to define the locations of points on the surface of a sphere or ellipsoid
grid coordinate system: a coordinate system mathematically placed on a flat map projection surface
image map: a map made by superimposing traditional map symbols on an image base
land partitioning: the division of property into parcels
map marginalia: additional information displayed within the mapped area or outside the main map area that helps explain or support the map
map legend: the key to understanding the mapped features
map projection: a geometric transformation of the Earth’s spherical or ellipsoidal surface onto a flat map surface
map reading: the process of looking at the map to determine what is depicted and how the cartographer depicted it
map scale: the relationship between distances on the map and their corresponding ground distances; also called cartographic scale
mental map: a map of the environment that people hold in their minds; also called a cognitive map
parcel: an area of land that has some implication for landownership or land use
plat: a map drawn to scale to show the parcels within a legal subdivision
qualitative information: information that varies in type but not quantity
quantitative information: numerical data that represent an amount, magnitude, or intensity
positional reference system: a system used to pinpoint the coordinates of features in geographic space
relief: the three-dimensional nature of the terrain surface
remote sensing: the process of collecting images of the Earth and other planetary bodies from a distance
selection: the process of deciding what type of and how much information to portray on a map
symbolization: the process by which features and their attributes are represented by graphically stylized marks or signs, called symbols, and sometimes by labels
terrain surface: a three-dimensional portrayal of data about the elevations of the physical environment
2. Map Reading
Map reading is the process of looking at the map to determine what is depicted and how the cartographer depicted it (Kimerling, et al., 2016). This involves identifying the features or phenomena depicted, the symbols and labels used, and information about the map that may not be evident on the map. If the symbols on a map and how they came to be there cannot be understood, the features represented on the map cannot be translated into a mental image of the real environment. Therefore, map reading can be framed within a discussion of the tangible cartographic map, which is a graphic representation of the environment that can be experienced physically through sight, sound, or touch, and the mental or cognitive map of the environment that people hold in their minds. Ultimately, it is the map in their heads, not the map in their hands, that people use to make decisions. This encompassing view of maps allows the inclusion of a variety of map forms that are otherwise awkward to categorize, such as mental maps (see Participatory Cartography, forthcoming), web maps (which may exist ephemerally; see Web Mapping), and new cartographic forms developed in the future.
Cartographic maps are valuable aids to help readers gain better understanding of their environment, develop better mental maps, and ultimately make better decisions. The map allows the reader to view the environment as if it were less complicated. There are advantages to such a simplified picture, but there is also the danger of an unrealistic view. Through successful map reading, cartographic and mental maps merge to tune the reader’s spatial thinking to the reality of the environment.
Map reading is a creative and sometimes difficult task because much of what exists in the environment is not shown on the map (see Scale & Generalization), and features on the map may not occur in reality but are instead interpretations of environmental characteristics. Although the mapmaker tries to translate reality into the clearest possible picture of the environment on the map, it is up to the map reader to convert this picture back into a useful mental image of the environment. Accordingly, different users may derive different understandings from the same map (MacEachren, 1995).
To effectively read a map, it is useful to understand what is involved in compiling a map. First, the environment is deconstructed into a selection of constituent features or phenomena that are classified and characterized. Second, meaningful and accurate data are gathered about the features or phenomena and their attributes. Third, the data are processed and manipulated so that the results can be displayed graphically using map symbols in a way that reveals something interesting or useful about the mapped environment (Kimerling, et al., 2016). The resulting graphical display shows the location and characteristics of geographic features and the relationships among geographic features.
Map reading starts with identifying depicted features or phenomena through their map symbols and associated labels. This mental activity is sometimes intuitive, especially if the symbols are familiar (e.g., blue lines for rivers and green polygon fills for vegetated areas (see Design and Aesthetics), features are clearly labeled (e.g., the only green line on the map is clearly labeled “Pacific Rim Trail”), or symbols mimic the feature they portray (e.g., a tent symbol is used to designate a camping area) (MacEachren, 1994). When the symbols cannot be interpreted intuitively, the map legend provides the key to understanding the mapped features (e.g., the topographic map and legend in Figure 1).
Figure 1. The symbols for the features shown on the Crater Lake topographic map by the U.S. Geological Survey (USGS) are identified in the legend. Source: USGS.
The first reading of the map should reveal the geographic area, subject, and form of representation of the features or phenomena shown. Map marginalia are additional graphics and text displayed within the mapped area or outside the main map area that help explain or support the map (Figure 2). The map legend is used to confirm the meaning of familiar symbols and provide the logic that underlies unfamiliar symbols. Alternatively, this information is sometimes in explanatory labels on the map itself or in text blocks (Brewer, 2015).
Figure 2. The map marginalia for the 1:24,000-scale and 1:250,000-scale maps of Crater Lake are primarily at the bottom of the page; for the 1:100,000-scale map they are mostly on the right side of the page. Source: authors.
The following sections present important concepts that impact map reading. Because one of the most fundamental uses of maps is to find the locations of features, map readers must understand how locations on the Earth are transformed to locations on the map. These locations are represented by geographic or grid coordinates, or by using land partitioning systems. Understanding the spatial relationships among features is aided by knowledge of the basics of map projections (see Map Projections) and map scale. To appreciate which features are included and how they are represented on maps, readers benefit from an understanding of how cartographers select, classify, and generalize mapped features (see Scale & Generalization and Statistical Mapping). Knowing about symbolization helps readers understand properties or characteristics of the mapped features (see Symbolization & the Visual Variables). Finally, for some maps, reading is aided by knowledge of how the terrain (see Terrain Representation) and remote sensor images (see Remote Sensing Platforms) are used as a base for maps.
3. Geographic Locations and Map Reading
3.1 Geographic Coordinates
Maps show where things are located. Maps that allow for precise determination of the locations of features include a positional reference system. Such a system is based on a geometric model—either a sphere or an oblate ellipsoid—that approximates the true shape and size of the Earth (see Map Projections). Once the dimensions of the sphere or ellipsoid are defined, a graticule of parallels and meridians gives the latitude and longitude coordinates of a feature. The result is a geographic coordinate system—a positional reference system that uses latitude and longitude to define the locations of points on the surface of a sphere or oblate ellipsoid. For example, geographic coordinates in degrees of latitude and longitude are shown at the corner of the Crater Lake map in Figure 3. The locations of elevations measured relative to an average gravity or sea level surface called the geoid are defined by three-dimensional (latitude, longitude, elevation) coordinates.
Figure 3. Latitude and longitude coordinates are shown at the corner of the Crater Lake topographic map. Elevations are defined relative to an average sea level surface called the geoid. Source: USGS.
3.2 Grid Coordinate Systems
The latitude-longitude geographic coordinate system has been used for over 2,000 years as the primary worldwide geographic coordinate system (Slocum et al., 2009). However, geocentric latitude and longitude coordinates on the sphere or geodetic latitudes and longitudes on the oblate ellipsoid, still key to modern position finding, are not as well-suited for making measurements of length, direction, and area on the map. Thus, grid coordinate systems often are used for measurement instead of geographic coordinates.
A grid coordinate system is a Cartesian (x,y) coordinate system placed on a flat map projection surface. This positional reference system designates locations on a map using horizontal and vertical lines spaced at regular intervals so that coordinates can be read from the square grid of intersecting straight lines (Kimerling, et al., 2016). A commonly used grid coordinate system for the world is the Universal Transverse Mercator (UTM) system. UTM coordinates in meters are indicated in the margins of the Crater Lake map in Figure 3, and State Plane coordinates (SPC), also commonly used in the United States, are shown in feet. Map readers should therefore become familiar with the appearance and properties of these and other grid coordinate systems placed on maps to support positioning and measuring features on maps (see Plane Coordinate Systems, forthcoming).
3.3 Land Partitioning Systems
Land partitioning is the division of property into parcels, which are areas of land that have some implication for landownership or land use (Kimerling, et al., 2016). One of the first steps in the management of an area of land is to divide it into parcels that are then recorded on plats—maps drawn to scale to show the parcels within a legal subdivision. People interested in understanding details about landownership, zoning, taxation, and resource management often encounter plat maps and thus need to read them properly to understand their measurements and descriptions.
Land partitioning systems include both irregular (unsystematic) and regular (systematic) systems (Dent et al., 2008). Geometrically irregular schemes used in the United States include the metes-and-bounds system, French long lots, Spanish and Mexican land grants, and donation land claims. Regular systems, common in many parts of the world, include the U.S. Public Land Survey System (PLSS) and Canada's Dominion Land Survey, both of which are based on an array of townships and ranges. The PLSS is portrayed on the Crater Lake map in Figure 3 with red section and township lines and red township and range labels along the margins.
3.4 Map Scale
Maps always are smaller in size than the environment they represent. The amount of size reduction is known as the map or cartographic scale, which is the relationship between distances on the map and their corresponding ground distances (see Scale & Generalization). To use maps effectively, an understanding of important concepts relating to map scale is required, including how map scale is indicated on maps (verbal statements, representative fractions, and scale bars, as shown in Figure 4), how to covert between these indicators, and how to determine the scale of a map when no scale indicator is shown on the map (Kimerling, et al., 2016). Knowing the map scale is needed for correct map reading and use, especially when making measurements (Tyner, 2010).
Figure 4. The map scale for the Crater Lake maps is expressed as a representative fraction, a verbal scale, and four scale bars. Source: authors.
The features of interest must be displayed at the correct scale for many map use purposes (Robinson et al., 1995). Large-scale maps are used when a small ground area is mapped in detail with little generalization of features (see Scale & Generalization). When accurate distance, direction, and area measurements are required, only large-scale maps suffice. The distortion on a map at a scale of 1:250,000 or larger is relatively negligible, so these large-scale maps can be considered geometrically exact representations of the small section of Earth they cover. The Crater Lake map in Figure 3 has a scale of 1:100,000, supporting reliable reading for purposes such as navigation and wayfinding, geocaching, orienteering, and other activities that require accurate position, distance, and direction finding.
Small-scale maps provide a more generalized presentation of a larger area, such as a state, country, continent, or the entire globe. The scale changes continuously across small-scale maps, so scale indicators on these maps give the scale at a particular point or along a given line or lines but are not accurate for the entire map.
3.5 Map Projections
A map projection is a geometric transformation of the Earth’s spherical or ellipsoidal surface onto a flat map surface (see Map Projections)). Marginalia for the Crater Lake map (Figure 3) indicate that the map projection is the one that is used for UTM zone 10 north, which is a transverse Mercator projection with specific parameters to reduce distortion within the zone (between 126°W and 120°W and between the equator and 84°N). Knowing about commonly used map projections allows map readers to infer information about distance and area distortion even if it is not the projection explicitly stated on the map.
Map projections are considered one of the most bewildering aspects of map reading specifically and cartographic design generally (Kessler & Battersby, 2019). Failure to understand the impact of the projection on the resulting map has unfortunate consequences, as it hinders readers’ ability to understand how geographic features are distributed across the Earth. It also allows cartographers—through lack of understanding or by design—to use map projections in potentially deceptive ways.
All map projections onto a two-dimensional plane distort the three-dimensional Earth in some way. The two-dimensional planes on which maps are projected include cones, cylinders, or planes—these are called the developable surfaces (see Map Projections). Distortion in map projections is not only related to these surfaces, it is also related to the case (either tangent or secant) and aspect (equatorial, polar, transverse, or oblique) of the projection and the location of the standard point or line(s) of tangency on the developable surface (Figure 5). Combinations of these projection properties result in recognizable patterns of the graticule in map projections. Being able to identify projection properties through appearance of the graticule helps map readers better assess the geometric distortion on a map.
Figure 5. Properties of map projections, such as the developable surface, case, and aspect, influence the map projection’s geometric distortion. Only at the point and line or lines of tangency is scale true (scale factor or SF = 1). At all other locations, the SF is either smaller or larger than 1. Source: authors.
Map projections often are organized by the geometric properties that they preserve, such as areas or shapes of geographic regions as well as distances or directions from one point or a between a pair of points (Campbell, 2001). The ellipses of Tissot's Indicatrix can be used to visualize the spatial change in distortion across the map. Figure 6 illustrates, via these ellipses, the geometric properties that are distorted or preserved in a selection of common map projections. For a more complete guide to map projections and their properties, see the USGS Map Projections poster at https://www.usgs.gov/media/files/map-projections-poster.
Figure 6. These map projections are commonly used because of the geometric properties they preserve. Distortion in the principal directions of a Tissot's Indicatrix (shown with an orange ellipse) helps visualize the geometric distortion at locations across the maps. Source: authors.
4. Cartographic Design and Map Reading
4.1 Cartographic Compilation
Maps are abstract representations of the geographic environment and not reality itself. Because maps are scaled down representations of the earth (see Scale & Generalization) that are projected onto a most often flat surface (see Map Projections), cartographers reduce complexity and increase clarity during the cartographic compilation process through selection, generalization, classification, and symbolization of the features on the map (Robinson, 1995).
For a cartographer, the first step in compiling information about the world into something that can be represented on a map is called selection—the process of deciding what type of and how much information to portray on a map. The cartographer’s selection of features is driven by the map’s subject and purpose. Once selected, features then are generalized into a simplified form appropriate for the map scale (see Scale & Generalization) for a range of generalization operators). The selected and generalized data can be further manipulated through classification, the process of grouping or ordering features into categories (for qualitative data) or classes (for quantitative data) (see Statistical Mapping).
The final step in the cartographic compilation process is symbolization, a process by which features and their attributes are represented by graphically stylized marks or signs, called symbols (see Symbolization & the Visual Variables), and sometimes by labels (see Typography). Symbols do not always take on the appearance of the geographic features they represent (see Map Icon Design), potentially requiring a legend, as discussed above.
Proficient map readers understand the consequences of decisions made throughout the cartographic compilation process. Skilled map readers also appreciate artifacts of the compilation process that improve readability but may also affect map accuracy and uncertainty (Tyner, 2015; see Representing Uncertainty).
4.2 Mapping Qualitative versus Quantitative Information
Many maps portray qualitative information—information that varies in type but not quantity (Robinson et al., 1995; Figure 7). Learning the basic principles of qualitative data symbolization help map readers understand how different types of point, line, and area features are symbolized on maps. Map readers should be able to understand the ways that cartographers depict a single feature using point, line, or area symbols, or combine multiple features in more complex reference or thematic maps and charts.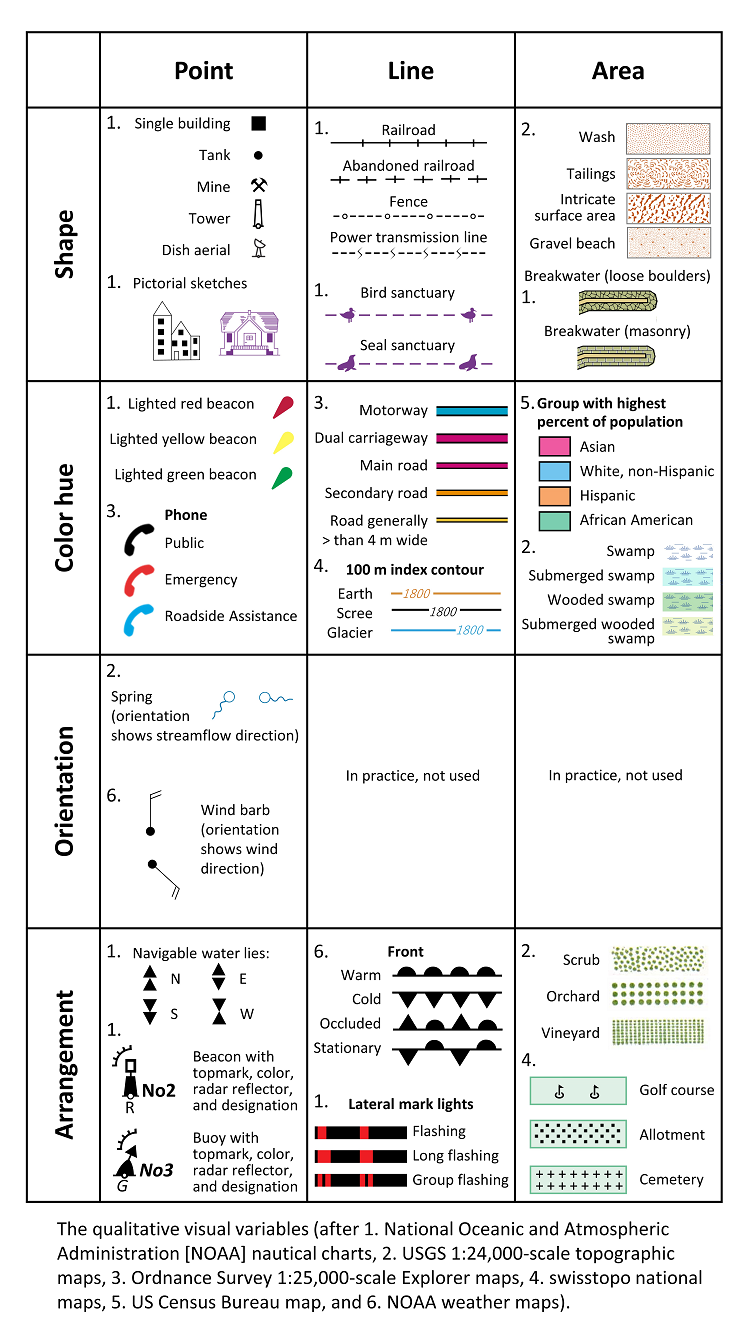
Figure 7. Qualitative visual variables for features represented by point, line, and area symbols on maps. Source: authors.
Similarly, map readers should understand the methods cartographers use to portray quantitative information—numerical data that represent an amount, magnitude, or intensity (see Common Thematic Maps, forthcoming; Robinson et al., 1995; Figure 8). Quantitative information often is shown using classes to simplify the map and associated legend, but at the cost of potentially masking important variations in the data distribution (see Statistical Mapping). Accordingly, the variety of classification methods and their differences must be understood to properly read quantitative information on maps. For more information on mapping qualitative and quantitative information, see Symbolization & the Visual Variables) and Map Icon Design).
Figure 8. Quantitative visual variables for features represented by point, line, and area symbols on maps. Source: authors.
5. Reading Unique Map Types
5.1 Example 1: Reading Terrain Maps
In mapping, a terrain surface is a three-dimensional portrayal of elevation data describing the physical environment (see Terrain Representation). For topographic maps, understanding relief—the three-dimensional nature of the terrain surface— is crucial to establishing position and studying spatial associations of the terrain with other geographic phenomena, such as vegetation and rainfall. Knowing the many ways that relief is portrayed cartographically—such as contours, relief shading, hypsometric tinting, and oblique views, to name only a few (Figure 9)—allows map readers to determine absolute or relative elevation on maps and to identify different terrain features (Slocum, et al., 2009).
Figure 9. The terrain around Crater Lake can be represented by contours, relief shading, hypsometric tinting, and combinations of these. An oblique projection provides a three-dimensional perspective of terrain compared to planimetric maps that portray the landscape from a vantage point directly above the mapped area. Source: authors.
5.2 Example 2: Reading Image Maps
The use of remote sensing in support of cartography has grown enormously over the last century (see Remote Sensing Platforms). Remote sensing is the process of collecting images of the Earth and other planetary bodies from a distance. These remotely sensed images capture features in the environment using cameras or other electronic imaging instruments (sensors) that are sensitive to the energy emitted or reflected from objects (Robinson et al., 1995; Campbell, 2001).
Although remotely sensed images are excellent for showing many features in the environment, they may fail to depict others, for example, political boundaries. Many useful map elements, such as symbolized features, labels, and reference grids, are absent on images. Features on images typically are not classified and identified in a legend. For these reasons, remotely sensed images often are made more interpretable and useful by cartographic enhancement, with overlaid symbols for point, line, and area features, as well as text for labels. A map made by superimposing traditional map symbols on an image base is called an image map (Kimerling, et al., 2016), which is a common option for web maps today (Figure 10).
Figure 10. This online image map of Crater Lake is annotated to show the roads and creeks near the southwestern rim of the crater. Note the distortion in the appearance of the trees near the lake which appear to be leaning toward the water. Source: authors.
Properly reading image maps is aided by an understanding of the many factors that can influence the appearance of the remotely sensed images, including the sensor’s vantage point, spectral sensitivity, technical quality, spatial resolution, and atmospheric conditions. Additionally, map readers may need to understand how to interpret black-and-white, true-color, and color-infrared imagery or how to identify variations in the appearance of features and patterns in images taken in the visible, near-infrared, thermal-infrared, and microwave (radar) portions of the electromagnetic spectrum.
6. Conclusion
Familiarity with the cartographic concepts and mapping methods outlined above give map readers an appreciation of the important decisions that are made about what to map and the methods used to show different aspects of the environment on maps. Understanding key concepts related to geographic locations, cartographic compilation, and unique map types help map readers to better understand the large and varied amount of geographic information that can be gathered from reading a map as well as the map’s accuracy or uncertainty. If map readers can merge their mental maps with their reading of cartographic maps, they will be better able to tune their spatial thinking to the reality of the environment. This is the ultimate goal of map reading, because it is the map in their heads, not the map in their hands, that people use to make decisions.
Brewer, C. A. (2015). Designing better maps: A guide for GIS users (2nd ed.) California, USA: Esri Press.
Campbell, J. (2001). Map use & analysis (4th ed.) New York: McGraw-Hill.
Dent, B., Torgusen, J., & Hodler, J. (2008). Thematic map design (6th ed.). New York: WCB/McGraw-Hill.
Kessler, F. C., & Battersby, S. E. (2019). Working with map projections: A guide to their selection. Boca Raton, FL: CRC Press.
Kimerling, A. J., Buckley, A. R., Muehrcke, P. C., & Muehrcke, J. O. (2016). Map use: Reading, analysis, interpretation (8th ed.). California Redlands, CA: Esri Press.
MacEachren, A. M. (1994). Some truth with maps: A primer on symbolization and design. Washington: Association of American Geographers.
MacEachren, A. M. (1995). How maps work: Representation, visualization, and design. New York: Guilford Press.
Robinson, A. H., Morrison, J. L., Muehrcke, P. C., Kimerling, A. J., & Guptill, S. C. (1995). Elements of cartography (6th ed.). New York: Wiley.
Slocum T. A., McMaster, R. B., Kessler, F. C., & Howard, H. H. (2009). Thematic cartography and geographic visualization (3rd ed.). Upper Saddle River, NJ: Pearson/Prentice Hall.
Tyner, J. A. (2010). Principles of map design. New York: McGraw-Hill.
Tyner, J. A. (2015). The world of maps: Map reading and interpretation for the 21st century. New York: Guilford Press.
Bertin, J. (2010). Semiology of graphics: Diagrams, networks, maps. California: Esri Press.
Harley, J. B. (1988). Maps, knowledge, and power. In D. Cosgrove, & S. Daniels, (Eds.), Iconography of landscape: Essays on the symbolic representation, design and use of past environments, (277-311). Massachusetts: Cambridge University Press.
Kraak, M-J. (2014). Mapping time: Illustrated by Minard’s map of Napoleon’s Russian campaign of 1812. Redlands, CA: Esri Press.
Krygier, J., & Wood, D. (2016). Making maps: A visual guide to map design for GIS (2nd ed.). New York: Guilford Press.
Monmonier, M. S. (1996). How to lie with maps (2nd ed.). Illinois: University of Chicago Press.
Wood, D. (1992). The power of maps. New York: Guilford Press.
Keywords: